Physics in the context of MAE3 Machine Design and Analysis:List of Topics: Units: When to use what? Vectors decomposition Statics vs Dynamics Forces Torques/moments
Energy
Units: When to use what? Table of common units: | | English ('merican) | SI (Système International) | length
| inch, foot | centimeter, meter | | weight | pound (lb) | *see force* | | mass | slug | gram, kilogram | | time | second | second | | force | lbf,lb | newtons | | energy | foot-pound force, btu | joules | | power | horsepower | watts |
Use English for design. Why? Because all the materials and machines readily available in the United States are English. For example: The mills in the machine shop have English lead screws, so each rotation of the handle corresponds to .1 inches.
Use Metric for analysis. Why? because metric system is the scientific measurement system. Analysis is MUCH easier. For example: English system often confuses with mass and weight. There are two types of "pounds", pound-force and pound-mass. If you mistakenly use pound-force, your answer will be off by a factor of g = 32.2ft/s^2
Statics vs Dynamics Basics: - an object in 2d space can either translate (in X and Y direction), or rotate.
- every motion of an object in 2D can be fully described by it's X,Y position and it's angle θ.
- Newtons 2nd law states gives us:
x-translation: ΣFx = max y-translation: ΣFy = may rotation: ΣMp = Iα
Static Equilibrium: An object in static equilibrium is not moving. An object that is not moving is not accelerating, plugging a=0 into our force equations:Quasi Static: Quasi means "seemingly". So what does "seemingly static" apply? - Objects that accelerate very slowly. Imagine a heavy robot small acceleration: .0005 m/s2. This number is so small it is essentially zero! However, keep in mind everything is relative, a lighter robot will be more effected by such a slow acceleration.
- Objects that are in motion but not accelerating. An object can be moving/spinning (non zero velocity) but not accelerating!
Dynamics: Dynamics occur when an object is in motion. An objects motion is described by the applied forces and its mass. Using the follow equations, we can calculate the motion of an object. ΣFx = max ΣFy = may ΣMp = Iα
Basic Force Balance Examples: For the following examples, solve for force F, such that the "seesaw" does not move, aka static. In order to solve all of these problems, the first thing to realize is that if the object in static equilibrium, it neither translates nor rotates. Thus, the sum of forces and sum of moments are equal to zero.
Tips: - Why are there no force balance? If you chose the point at which you calculate the moment correctly, you will not have to write the force balance equations!
- Moment sign convention? Following the RHR (right hand rule) convention, CCW(+) and CW(-). It is extremely important to be consistent with the signs!
- I got a negative force! Relax, negative forces are fine. Just leave it negative. It just means that the force is the opposite way you drew your arrow.
Example 1: Discussion: This example is so simple any kindergartner will tell you that F=3N using common sense and playground expertise. However, the proper way to solve this problem is to sum the moments about point P: ΣMp = 3*3 - 3*F = 0 F = 3N
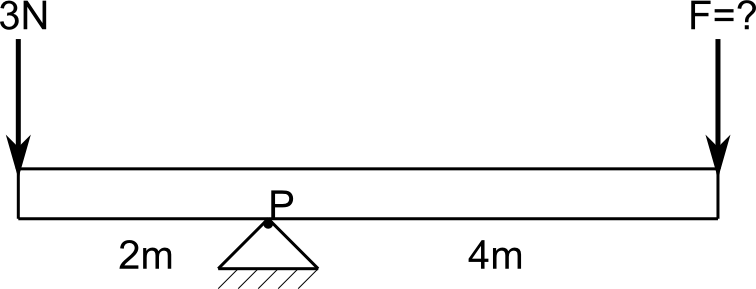
Example 2: Discussion: This one is a bit more complicated. It is possible to solve this equation using intuition. However, using the moment balance equation will allow us to solve this problem systematically: ΣMp = 2*3 - 4*F = 0 F = 1.5N
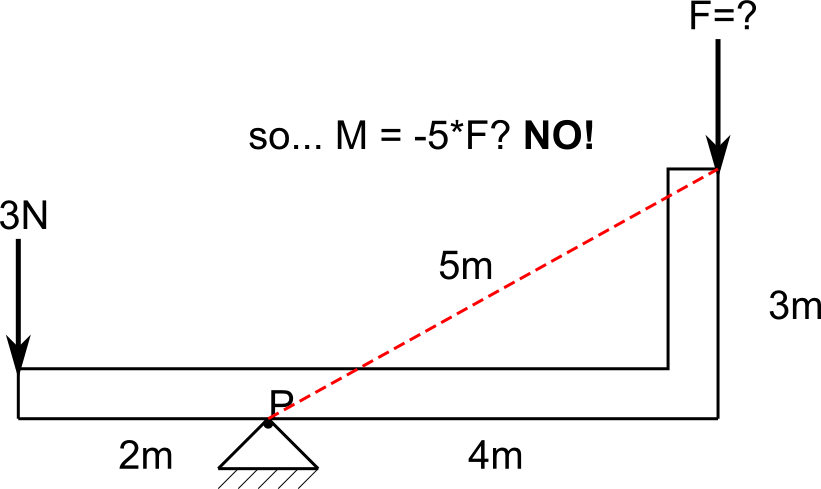
Example 3: Discussion: It should be immediately apparent that this problem has the exact same solution as example 2. If it is not, the most common mistake people people make for this problem is to take the length of the moment arm to be 5m. The red line is not the correct moment arm! The moment arm is always perpendicular to the applied force, so it is 4m, not 5m! The solution is identical to problem 2: ΣMp = 2*3 - 4*F = 0 F = 1.5N
Example 4: Discussion: the moment arm can be visualized as: thus, the solution is: ΣMp = 2*3 + 3*F = 0 F = -2N The force is negative because in order to balance this system, the force needs to be in the opposite direction as drawn. If you visualize the seesaw and forces in your head, this should be immediately obvious.
Discussion: Have fun! The solution is F=1.13N
|