Rack Em Up Robots!
"Gotta rack em all" -Nate Liu  Professors Garay, Gravish, and Delson decided to visit the billiard tables on campus one Friday evening to celebrate what a great group of MAE 3 students they had this quarter. Profs G, G, and D love to play billiards and sometimes even will have friendly wagers to motivate competition. However, on this particular afternoon playing a game of 6 ball (a variant of 9 ball billiards that your profs enjoy so much) an argument broke out. Every time professor Gravish racked the balls professor Garay could not get a ball in on the break. After some heated words, professor Delson calmed the professor Gs down.
"Guys, guys, there is no need to fight about a pool game. If I am going to play with you two at all in the future we need to have an impartial racking method" Said prof. Delson
"I don't know Prof D, I think it will be pretty hard to make a mobile robot that can rack a game of 6 ball in 60 seconds. Pool balls are slick and they are pretty heavy at 160 grams each." Said prof. Gravish
"I have just the group of engineers who can solve this challenge!" Said prof Delson.
Enter out intrepid engineers in MAE 3 to solve this issue. Your MAE 3 professors are challenging you the students to devise a racking robot, capable of collecting billiard balls distributed across the competition arena and racking them for a game of 6 ball billiards. This robot competition is not for the faint of heart however. There are significant challenges that need to be overcome:
Competition:
Two robots will compete head to head for 60 seconds. Robots will try to collect as many billiard balls as they can and deposit them in their scoring area to score as many points as possible. All scoring will be done at the completion of the contest after all parts have finished moving.
Ball Collection Sites:
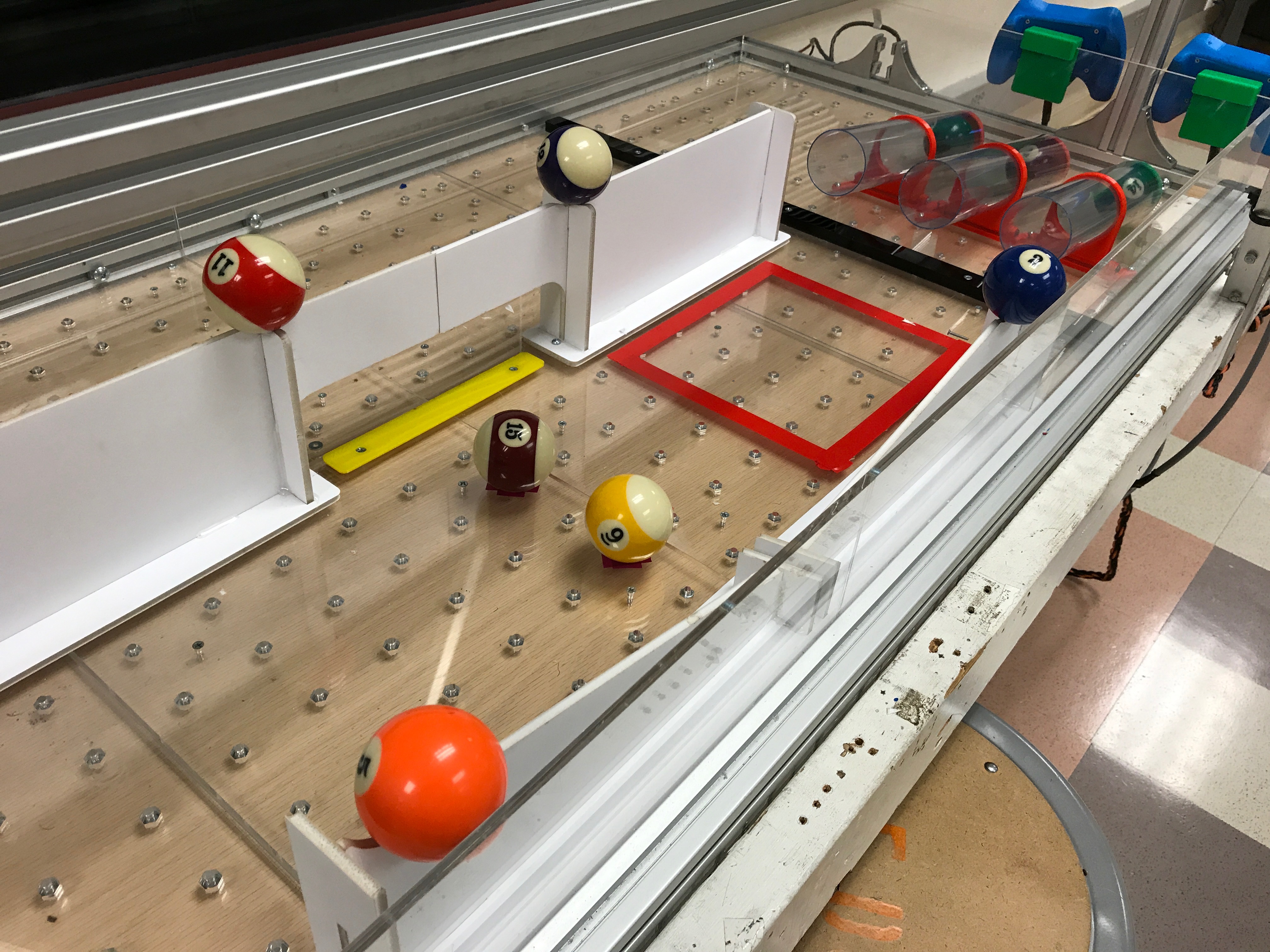
There are several areas where balls can be collected: the tilt depot, the side walls, the arena floor, and the centerwall.
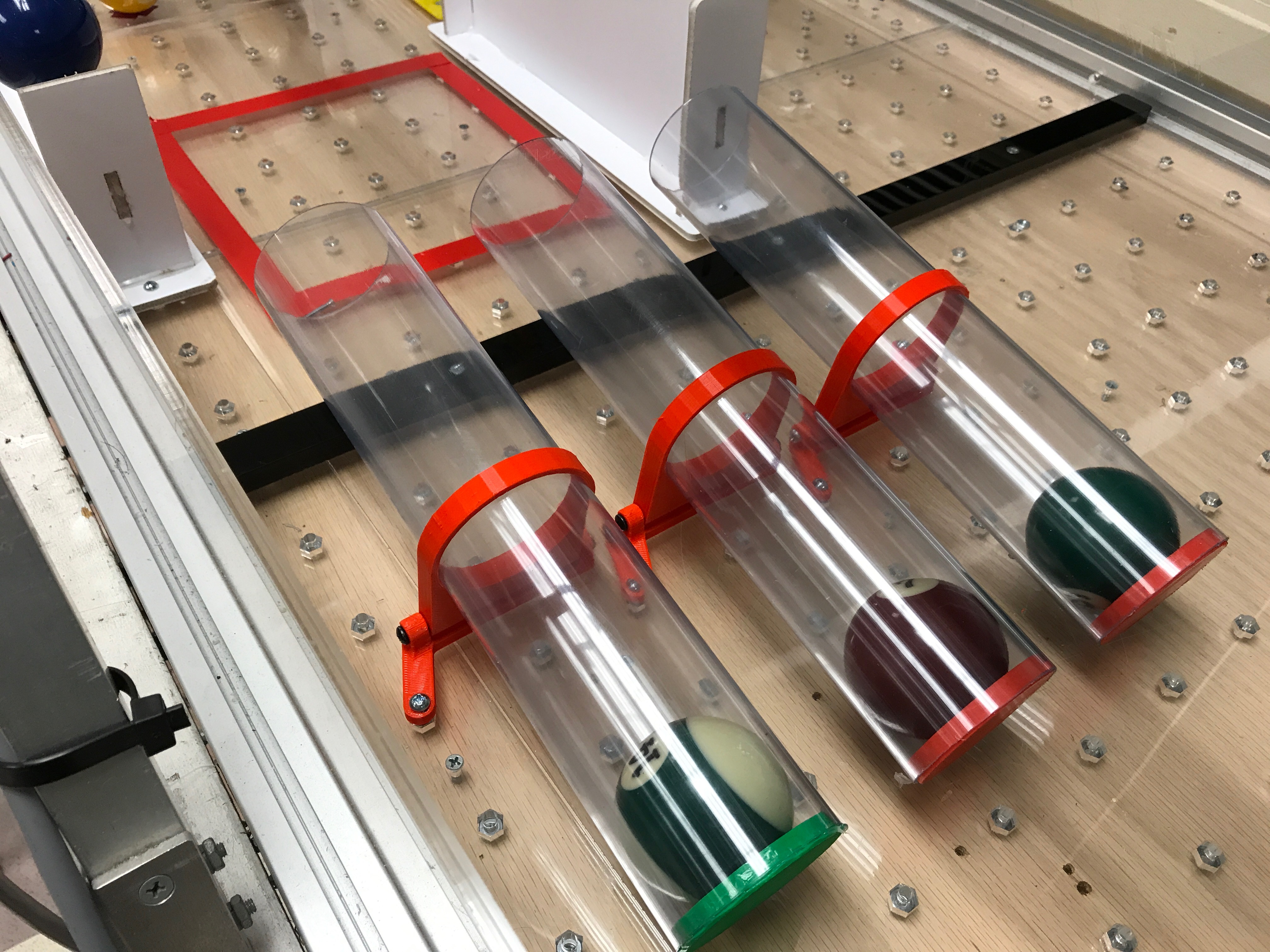
1) The Tilt Depot:  Three billiard balls are stored in tilting tubes at the end of the arena. By tilting the tube the ball will roll out into the playing arena where they can be collected and transported back to the scoring area. The tubes can be tilted by either pushing on the raised end or lifting the lowered end and each tube rotates independently.  2) Side Walls: Two balls are perched on the Side Walls of the arena. These balls can be picked off of the rails and taken to the scoring area. Be careful not to disturb them too much or they will roll down the rail to the center of the arena. 3) Arena Floor: Two balls will start in the arena center to be transported to the scoring area. 3) Center Walls: Two balls are placed on the center wall which either team can collect for extra points. You can potentially lose your balls by having them roll under the center wall! Important Highlight: Center "Speed Bump" To prevent your balls from casually rolling to the other side, we installed a small 1/8in tall speed bump at the center of the wall.   The Scoring Area:
The collected balls need to be taken to the scoring area. The scoring area sits behind a 1/2in tall divider on ground. Any balls placed behind this divider will score points with the value depending on where the balls are at the end of the competition. The racking triangle is raised 2in off of the ground and has a recessed area for the pool balls to sit in.

The Starting Box:
Robots will start on the far side from the scoring area (closest to the tilt depot). The starting box will be 9x9x18in and the robot must fit entirely within this box at the beginning of the competition. To note, robots must be able to fit within the box at competition start but do not have to fit within the box at the end of the competition.  The Rails:
Both teams will have available to them a horizontal rail raised 14in off of the ground. The rail is made from 30x30mm aluminum and has a slotted cross section which robots can use to aid in driving. There are no stoppers on the rail.
Scoring: A ball will be counted in a scoring area if it's center of mass is in the vertical air space of the respective scoring area and the ball is in contact with either the ground or in contact with a ball that is touching the ground. 4/24/17
Tie Breakers:
In the case of a tie, the team who scored the first point wins the tiebreaker.
Actual Photos:
 General MAE3 Competition rules:
A complete list of rules is provided at the end of this document, and any clarifications to the rules will be posted at the end of this webpage throughout the quarter. However, some key rules are:
Electrical PowerThe robots must be powered solely from electrical power transferred through the power cord, and from potential energy stored in the robot at the start of the contest. The kit includes 2 geared DC motors, 3 non-geared DC motors, and one solenoid. Electrical power will be provided from a power supply with a maximum of 5VDC output. The power will be controlled by the following switches:
Each switch is Double Pole Double Throw (DPDT) switches, which can operate a DC motor in either direction. Note the kit contains five DC motors and one solenoid, but only four user controlled switches. More than one electrical device can be connected to a single switch, but the voltage may drop if a large current draw is placed on the power supply. Use of motors, solenoids, and switches will be covered in lecture and is described in the course pack. Review the Power Supply and Multimeter Use carefully. Issues with the electrical power often occur with the Variable Voltage switches, since the maximum current output is less in these switches. The non-geared motors draw high current and startup problems may occur if multiple non-geared motors with high loads are tied to the variable voltage source! Kit Parts and Use GuidelinesEach machine must be constructed solely from materials provided in the Kit Parts list (List attached below). Some key points on these guidelines are:
In addition to the kit parts listed in the table, the following items may be included in the machine:
Replacement Material Policy 3D Printed Parts See 3D printing page for complete rules: https://sites.google.com/a/eng.ucsd.edu/mae3/3d-printing
Each team may have parts made in the Design Studio's 3D printers under the following guidelines.
Contest Day DetailsThe contest will be held during the MAE finals period and will be open to the public. The contest will be held in a single elimination fashion (like a tennis tournament). During the lab period of the last week of classes, each section will hold a section-wide contest. The results of this contest will be used to seed the placement of the final contest. Thus teams that perform better during their section contest will have statistically easier contests in the early rounds. Since the number of teams in the class will not be exactly a power of 2, the higher seeded teams may get a "bye" during the first round. If necessary "wild card" teams will be selected to have a second chance in the contest, to ensure that all pyramid spots are filled. Performance in the contest depends on numerous factors that do not relate to engineering quality of the robot, including driving skill and luck! The grade for the project will not be adversely affected by poor performance in the contest, but will be based upon:
Expanded Rules ListOnly the tools and machine equipment in the Design Studio can be used to build the robot. Energy Sources: The energy used by the devices in the competition must come solely from: Potential energy derived through a change in altitude of the center of gravity of the machine Potential energy achieved by the deformation of the springs provided by the Kit Electrical energy derived through the umbilical during the 60 seconds when the power supply is energized. Umbilical Cables: The electrical connections will made to a single umbilical cord hung from above the table; one on each side of the table. The umbilical cord cannot be touched during the contest, and there will be some drag from the cable. Each machine must be designed to overcome this drag if necessary for motion of the machine. If requested a TA can ensure that the umbilical cable does not snag. Detailed Rules
|
Robot Contest >
2017 Spring Contest



| Selection | File type icon | File name | Description | Size | Revision | Time | User |
|---|